Ansys Mechanical Nonlinear Structural Simulation
two-day courseThis course provides an introduction to the Ansys Mechanical Environment of the Ansys software product suite.
The course focuses on use of the Mechanical user interface, which is included in Ansys Mechanical Pro, Ansys Mechanical Premium, and Ansys Mechanical Enterprise. Within this interface you read CAD geometry, assign material properties, apply loads and boundary conditions, define mesh controls, perform solutions, review analysis results, and generate an automatic html report.
The course devotes some time to theory and concepts at a very basic and practical level. These topics include finite element concepts, solutions of simultaneous equations, and contact models. These portions of the course emphasize practical theory concepts, which engineers need to understand in order to do finite element analysis.
Course requirements:
Ansys Version used to create course content: 2023 R2
Ansys Version DRD instructor will use for the course: 2023 R2
Ansys Version(s) students may use for the course: 2023 R2
Registration for all classes will close 5 business days in advance of the class date.
Learn more: Agenda + Course Description
Chapter 1 Introduction to Structural Nonlinear Analysis and Geometric Nonlinearities
Workshop 1 3D Large Deflection Analysis of a Roto-Molded Plastic Gas Tank
This workshop provides the opportunity for the student to solve the problem first as linear and then with nonlinear large deflection effects to compare the solutions. Students also use this workshop to gain an understanding of step, substeps, and equilibrium iterations and how to use automatic time stepping.
Chapter 2a Introduction to Nonlinear Contact
Workshop 2a – Nonlinear Contact Analysis of a Ring Gear and Housing Assembly with Interference
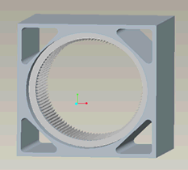 This model involves calculating stresses in the housing and ring gear due to initial interference. The initial interference in combination with friction holds the ring gear securely in the housing. This workshop provides additional practice on setting up, solving, and postprocessing nonlinear contact problems.
This model involves calculating stresses in the housing and ring gear due to initial interference. The initial interference in combination with friction holds the ring gear securely in the housing. This workshop provides additional practice on setting up, solving, and postprocessing nonlinear contact problems.
Chapter 2b Nonlinear Contact Deep Dive
Workshop 2b – Nonlinear Contact Analysis of a Cell Phone Antenna Snap Fit
 The problem initially does not converge, and the student adjusts nonlinear model parameters to make it converge. The model then gives incorrect answers, and the student resolves that problem. The student also uses a commands object to control whether the symmetric or unsymmetric solver is used in order to improve solution performance. In this workshop the student uses a nonlinear contact solution with friction to simulate a cell phone antenna snap fit problem.
The problem initially does not converge, and the student adjusts nonlinear model parameters to make it converge. The model then gives incorrect answers, and the student resolves that problem. The student also uses a commands object to control whether the symmetric or unsymmetric solver is used in order to improve solution performance. In this workshop the student uses a nonlinear contact solution with friction to simulate a cell phone antenna snap fit problem.
Chapter 3 Plasticity
Workshop 3a – Nonlinear Contact Analysis of a Ring Gear and Housing Assembly with Plasticity
This model involves calculating stresses in the housing and ring gear due to initial interference. This model expands upon workshop 2b and introduces plasticity to the model. Students post-process total strain to determine if the interference specification satisfies the design criteria of maximum 1% total strain.
Workshop 3b – 2D Plasticity Analysis of a Threaded Connection including Nonlinear Contact and Elastic-Plastic Behavior
This model represents a four part threaded connection assembly. Nonlinear contact is used to model interaction of the threads and the mating surfaces of the other parts. Students define a multilinear elastic-plastic model and calculate plastic and total strains.
Chapter 4 Eigenvalue and Nonlinear Buckling
Workshop 4a – Linear and Nonlinear Buckling Analysis of a Steel Column
This assembly is a C-channel shaped column with a cap and a base, all composed of A36 steel. A downward vertical load is applied at the top of the column that will cause it to buckle. DRD introduces the methodology of solving a buckling problem: from a simple Eigenvalue, or linear buckling analysis to a nonlinear buckling analysis where an elastic-plastic material model is employed to simulate permanent deflection and local instability. Students will learn the workflow analysts typically use to solve buckling problems.
Workshop 4b – Snap Through Analysis of a Spherical Tank Section Using Stabilization
A section of a curved tank needs to be analyzed to check deflections and stress. This geometry will buckle when a sufficient load magnitude is applied. Solution restarts and the stabilization feature is utilized in this workshop.
Chapter 5 Hyperelasticity
Workshop 5a – 2D Axisymmetric Analysis of a Hyperelastic Rubber Seal with Nonlinear Contact
This four part assembly model has two rubber parts modeled using a hyperelastic material model. Students import experimental data into the Workbench Engineering Data module and curve fit it to create Mooney-Rivlin constants. Initially the model does not converge, and students must modify the model to get it to converge. The model also provides an opportunity for students to experiment with different nonlinear contact formulations including pure penalty, augmented Lagrange, and normal Lagrange.
Workshop 5b – 2D Axisymmetric Analysis of a Hyperelastic O-ring with Fluid Pressure Penetration Loading
This model is comprised of three parts – a cylinder, ring, and seal. The cylinder enters the bore and contacts the seal to produce pressure between the cylinder and ring. Ideally this pressure would be great enough to keep fluids from breaking the seal. The second step applies fluid pressure to the exposed portion of the seal and continues to be applied to the portions of the seal that ‘peel away’ from the cylinder or ring. This fluid pressure penetration capability in Ansys is critical in determining seal performance.
Workshop 5c – 2D Axisymmetric Analysis of a Hyperelastic O-ring with Nonlinear Contact, Using Nonlinear Adaptive Remeshing (NLAD)
This model contains a tube, sleeve, o-ring and swaging body. The swaging body is pushed down, causing the tube to be plastically deformed into the seal, which is a hyperelastic body. A pressure is applied to the inside of the tube at a subsequent time. The o-ring undergoes severe deformation; the Nonlinear Adaptive Remeshing technique is used to remesh the model during the solve process automatically to get a completed solution, rather than the user remeshing manually if the model fails to solve.
to be plastically deformed into the seal, which is a hyperelastic body. A pressure is applied to the inside of the tube at a subsequent time. The o-ring undergoes severe deformation; the Nonlinear Adaptive Remeshing technique is used to remesh the model during the solve process automatically to get a completed solution, rather than the user remeshing manually if the model fails to solve.
Chapter 6 Bolt Pretension
Workshop 6a – Nonlinear Contact Analysis of Steel Enclosure with Bolt Pretension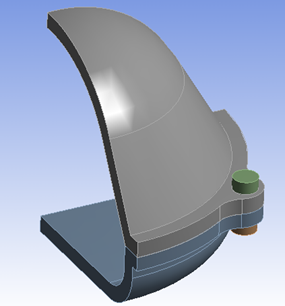
This four part assembly is held together with a pretensioned bolt. Students use Simulation bolt pretension to load the model. The objective of the model is for students to gain a thorough understanding of Simulation bolt pretension. This model also provides additional practice in modeling nonlinear contact.
Workshop 6b – Analysis of a Pump Fluid End with Bolt Pretension
This pump assembly is held together with four pretensioned bolts. Students use load steps to sequentially pretension the bolts one step at a time and then apply additional loads.
Chapter 7 Submodeling
Workshop 7 – Stress Analysis of Gearbox Casing Subjected to Static Loads including Plasticity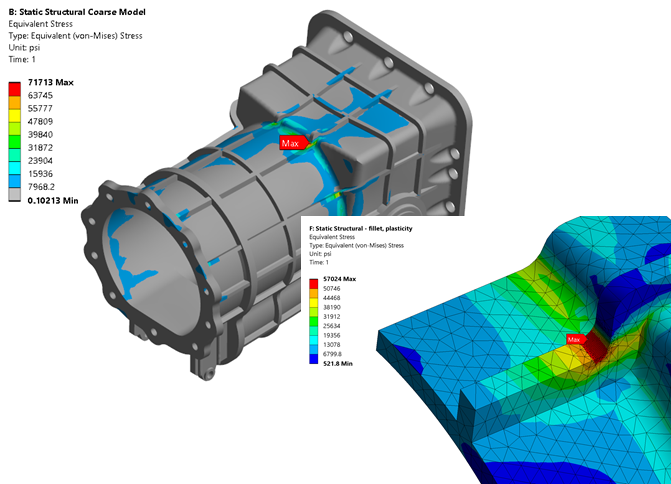
This gearbox casing is subjected to force and torque loading and the objective is to determine peak stresses in the structure. Students will use the submodeling process, which is based on St. Venant’s Principle, to build a coarse-grid model, take the displacements from locations within the coarse-grid model and apply them to a fine-grid model boundaries. Use of plasticity will be required to get accurate stress beyond the yield strength of the material.
Ansys SpaceClaim will be used to create the fine-grid model using the coarse-grid model as input.
Chapter 8 Gasket Modeling
Workshop 8 – Nonlinear Contact Analysis of a Control Valve including Gasket Behavior
This control valve has two gaskets, and the objective of the analysis is to optimize the gasket design. Workbench does not yet have gasket elements, so students use DRD developed commands objects to add gasket elements to the model. The model also involves bolt pretension, pressure, mechanism forces, and thermal loads. The model requires linear and nonlinear contact types. Students define temperature dependent material properties.
The initial design does not have a viable gasket design, and students use a design parameter and DesignModeler to modify the design to achieve an optimum gasket design.
Appendices

Students simulate the swaging operation using nonlinear contact with friction, a bilinear elastic-plastic model, and a multilinear elastic plastic model. This workshop requires conversion of a stress-total strain curve to a stress-plastic strain curve for defining the multilinear plasticity model in the Workbench Engineering Data module. The course materials provide only a general description of the problem and objectives, and students must solve the problem without detailed instructions.
Workshop C – Shell Model for a Battery Clip including Nonlinear Contact and Plasticity

This model involves modeling of nonlinear contact and plasticity in a structural shell model. The model simulates the compression of the spring when a battery is inserted into an electronics device. Students modify the nonlinear contact definition to account for shell thickness effect, and determine its effect on the strain in the clip.
Workshop D – Nonlinear Contact Model for Insertion and Removal of a 3D Mechanical Connector
This model is a 2-part mechanical connecter. The spring leg is inserted into the chassis and then removed. The main goal of this analysis is find out the force required to insert the spring leg into the chassis and then remove it from the chassis. It is also desired to find out the resulting stresses in the connector due to insertion and removal.
Workshop E – Large Deflection Analysis of a Cantilever Beam using Restarts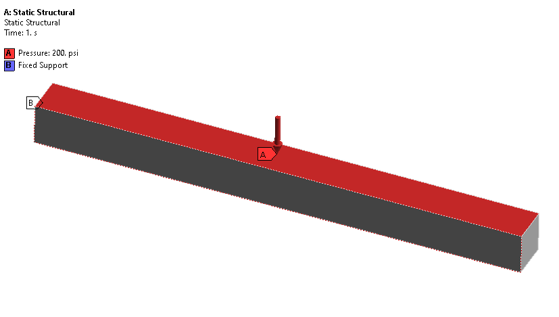
The main objective of the workshop is to calculate the stresses and deflections of the beam under a given loading. The workshop will stop and start using the restart capabilities of Workbench. Additionally, APDL post-processing commands will be inserted and executed without re-solving the model.
Workshop F: Hyperelastic Model with Nonflowing Incompressible Fluid
This model is comprised of three parts – top and bottom plates and a rubber fluid bladder. The bladder is compressed and non-flowing fluid elements are placed in the bladder to maintain a zero volume loss. Students use MAPDL commands to define the hydrostatic fluid elements HSFLD242 to simulate this non-flowing fluid in the bladder. The resulting force deflection curve is obtained.